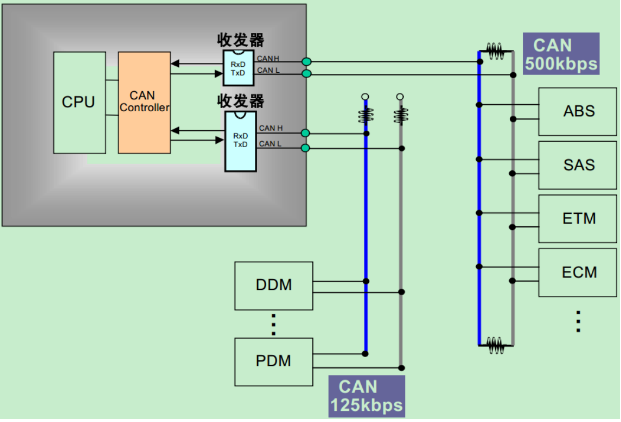
CAN作為一款強大的工業(yè)總線,其高性能和高可靠性讓其應用特別廣泛。一個小知識:汽車里面各個模塊之間的通訊就是使用CAN來實現(xiàn)的哦。
既然是總線,那當然會有多個設備掛載在CAN上,當一個設備在發(fā)送數(shù)據(jù)的時候,其他設備也沒有在閑著,它們會對接收到的數(shù)據(jù)格式進行解析,一旦發(fā)現(xiàn)有錯誤就會發(fā)送錯誤信號到總線上。
那么,如果一個設備確實出現(xiàn)了問題,老是發(fā)出錯誤格式的幀(比如波特率有偏差等等)怎么辦呢?嘿嘿,不等大家把它踢出局,它自己就會老老實實的退出總線,不再往總線上發(fā)數(shù)據(jù)了,這個就叫做BUS-OFF,也就是設備離線。
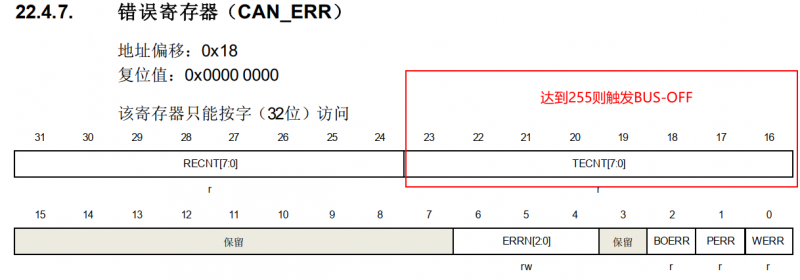
那么MCU如何觸發(fā)這個BUS-OFF呢?我們以GD32F303為例來說明。GD32F303的CAN在發(fā)送一次錯誤的幀后,會將發(fā)送錯誤計數(shù)器的值+1,當這個計數(shù)值達到255時,就會觸發(fā)BUS-OFF機制,退出總線。
這個時候有的小伙伴就會問了,一個設備運行很長時間,總會有發(fā)送錯誤的時候吧,如果就這么退出總線了,豈不是太冤了?其實不是的,當設備在發(fā)送錯誤計數(shù)器的值不等于0的情況下,發(fā)送一次正確的幀,這個計數(shù)值會-1的。
當一個設備BUS-OFF了,但它自恢復了錯誤狀態(tài),想繼續(xù)回到總線上怎么操作呢?有兩種方式:
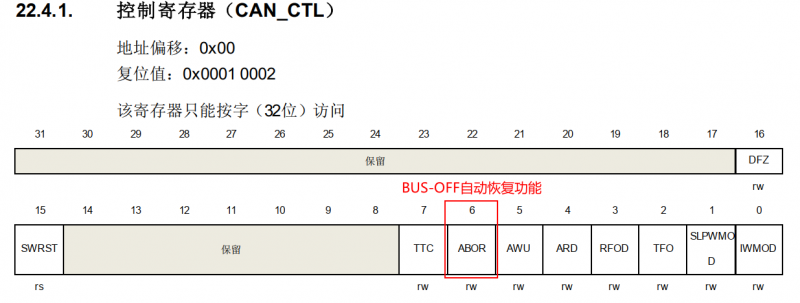
1、打開GD32F303的離線自動恢復功能,當出現(xiàn)BUS-OFF,MCU在檢測到離線恢復序列(在CAN_RX檢測到128次連續(xù)11個位的隱性位 )后就會自動恢復。
2、如果沒打開自動恢復功能,則需要讓CAN進入到初始化模式,再進入正常工作模式即可。